오늘은 두 조로 나누어 공정작업을 해본다.
1조 - 공급 판별 스토퍼 적재까지 한다.
2조 - 흡착이동 + 센서

PH-Lap 프로그램으로 실린더의 동작을 확인하는
공압기구배치도를 만들어 시뮬레이션 한다.

A+ A- B+ B-
다음은 전기 배선을 해본다.

위까지는 연습을 해보았고 지금부터 공정설계를 해본다.
*** 공정 설계 부품 ***
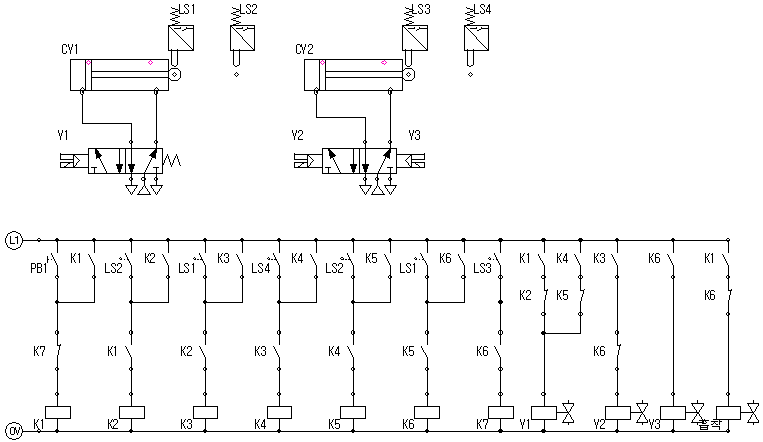
실린더 2개 : 공작물을 공급하는 실린더 (CY1)와 금속 작업물을 차단하는 실린더(CY2)
실린더의 위치를 판별하는 센서 4개 : LS1, LS2, LS3, LS4
편솔 2개 (Y1, Y2)
금속을 인식하는 센서는 스위치(유도형S)로 대체한다.

동작설명 :
작업물을 실린더1(CY1)이 전후진하여 공급완료가 되면
컨베이어 모터가 작동하고 타이머가 작동된다.
유도형 센서가 작업물을 인식하면 스토퍼가 즉시 하강하여 작업물을 차단하고
이후에 컨베이어는 타이머에 의해 정지한다.
PH-Lab 작업파일
*** 공정 설계 부품 ***
실린더 2개 : CY1 실린더는 상하운동, CY2 실린더는 전후운동을 한다.
실린더의 위치를 판별하는 센서 4개 : LS1, LS2, LS3, LS4
편솔 : Y1
앞으로 전진 후진하는 양솔 : Y2, Y3
CY1상하 - CY2전 - CY1상하 - CY2후
동작설명 :

PH-Lab 작업파일
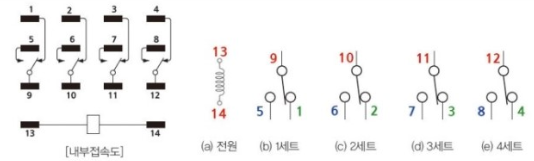
핀번호 작업하기
11핀 4개, 8핀 타이머 릴레이2개

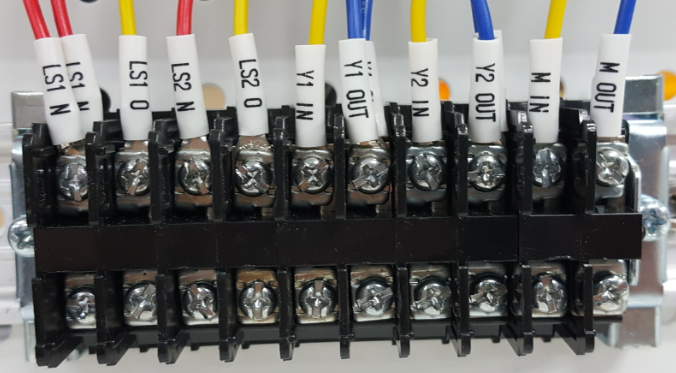
작업 진행 사진
기본 부품 장착

회로도의 (+) 쪽 결선

회로도의 (-) 쪽 결선

회로도의 중간 부분 결선

푸쉬 버튼과 유도형 센서 접점부분의 결선

리밋 스위치와 모터 접점부분의 결선
14핀 릴레이, 8핀 타이머 릴레이 접점부분의 결선
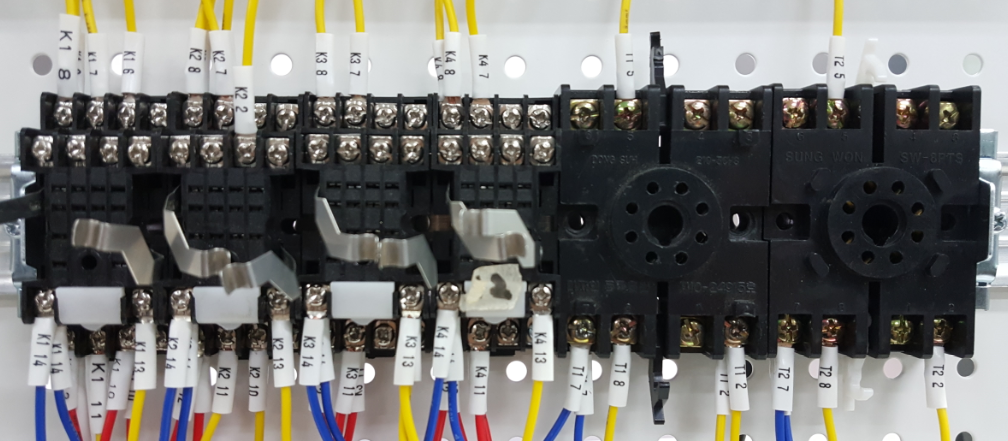
14핀 릴레이

아래는 2조가 작업한 배선 사진이다.
2조 - 흡착이동 + 센서

메인장비의 이상으로 결합해서 테스트는 못하고 릴레이 여자만 확인함.
릴레이로 테스트하는 것을 건너뛰고 곧바로 PLC 점점을 이용한 테스트로 넘어간다.
'자동제어 > 로봇제어' 카테고리의 다른 글
| 로봇 제어 - 실습프로젝트 6일차 (200703) (0) | 2020.07.03 |
|---|---|
| 로봇 제어 - 실습프로젝트 5일차 (0) | 2020.07.01 |
| 로봇 제어 - 실습프로젝트 3일차 (인터록회로) (0) | 2020.06.26 |
| 로봇 제어 - 실습프로젝트 3일차 (모터 정역회전) (4) | 2020.06.26 |
| 로봇제어 - 실습 프로젝트 2일차 (인터록회로) 200624 (0) | 2020.06.24 |



