반응형
티칭을 해본다.
암소자를 이용해서 어떤 위치에 가져다 놓았을때
그 위치의 좌표를 받아오는 것을 티칭이라 한다.
그럼 그 정보를 어딘가에 저장해야 한다.
메뉴의 표시 - 변수로 들어간다.
PJT 위치값 저장
소수점
S - 문자
P형, J형, T형에 저장할 것인지 결정한다.
우리는 P형을 쓴다.
6축의 값을 P형에 위치형 변수에 넣는다


위치변수에 대한 티칭 방법
원하는 위치로 간 다음에 위치정보를 가져오면 된다.


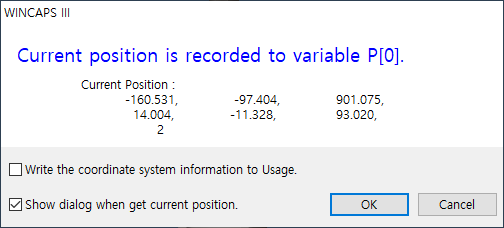

이제는 티칭(위치값 저장)한 것을 가지고 프로그래밍을 해본다.
티칭 점에서 점까지 가는 경로를 급속, 저속, 원호보간, p2p, cp movement ... 등이 있다.
P2P 모드 : 지점과 지점과의 이동을 로봇이 알아서 간다.
CP Movement : 최단거리로 간다.

'프로젝트 - 프로그램 작성'을 클릭한다.
그냥 ok를 누른다.

TakeArm Keep = 0 내가 움직이겠다는 조정관을 가져온다라는 뜻
'!TITLE "덴소 로봇 프로그램"
Sub Main
TakeArm Keep = 0
speed 100
move p,p0
move p,p1
move p,p2
End Sub
티칭을 위한 준비
티칭 팬던트나 데드맨 스위치
'자동제어 > 로봇제어' 카테고리의 다른 글
| 로봇제어 - 실습 프로젝트 2일차 (인터록회로) 200624 (0) | 2020.06.24 |
|---|---|
| 로봇제어 - 실습 프로젝트 1일차 (200623) (1) | 2020.06.23 |
| 로봇제어 _로봇암을 위치정보 지정 후 이동하기 (200526) (200611) (0) | 2020.06.11 |
| 로봇제어 4일차(0512) - 서보모터제어 (1) | 2020.05.12 |
| 로봇 장비 분해 - 본체 (2020.05.08) (0) | 2020.05.08 |


